 English
English 简体中文
简体中文











These are all customized products according to
customer's requirement. If needed, we can
provide custom sevice for you.
Industrial Production 5.0 Control
Excellent Management Team

In order to improve corporate image, intensify publication to create a good environment for the running and development of our company and show the scale and strength of our company, improve the external image of our company, the official website will be established soon.

Three Gorges Project,Qinshan and Da Yawan Nuclear Power Station,Pudong International Airport,Beijing Olympic Project have showed our excellent services,meanwhile, our products such as gear reducer, gearboxes are exported to Europe, America, Southeast Asia, the Middle East and Asia etc.
39 years of industry experience and many years of technology accumulation.
Including 9 invention patents, 5 design patents, 40 utility model patents.
We have a strong R&D team,and we can develop and produce series of gear reducer and gearboxes according to the drawings or samples the clients offered.
We have two long-term casting foundries and one our own CNC machining factory. So we can offer the price and products directly.
We have our own testing lab and the advanced and complete inspection equipment,which can ensure the quality of the products.
1.Quick and safe delivery.
2.One-year warranty period.
3.The photos and films of production process will be reported to you.
4.The service hotline is on duty 24 hours and responds within 24 hours.

The reducer is a series of reducers, but in order to ensure the safety of future operations and prol...

Before formal use, mechanical equipment generally requires a running-in period of about 200 hours. W...

When the gear reducer is installed, it is strictly forbidden to hit with a hammer to prevent the bea...

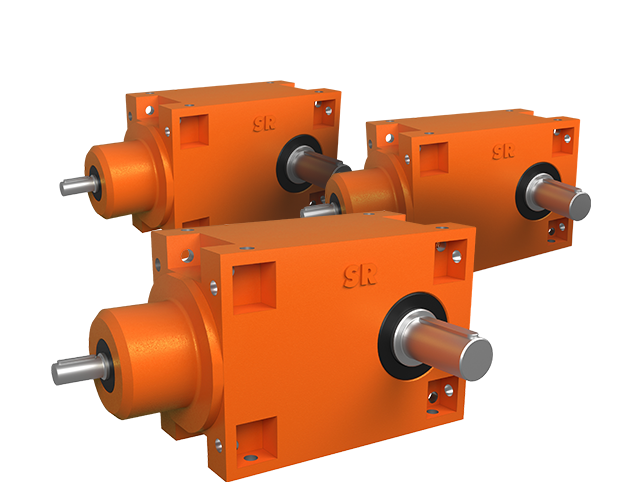
Reducer manufacturers share four series of reducers, including K series, S series, R series, and F s...

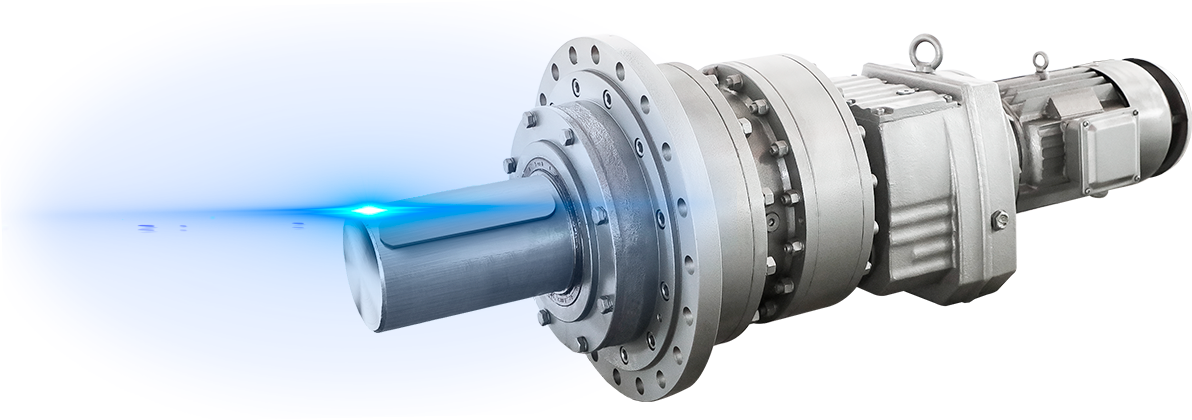
The reducer can reduce the speed of the motor and increase the output torque. The reducer is used as...
The reducer reduces the speed of the main equipment through the rotation of its own gear, so everyon...
















